OS 模块编程实验题解
HDU 潘万彬老师的操作系统课程后作业
2024/04/11
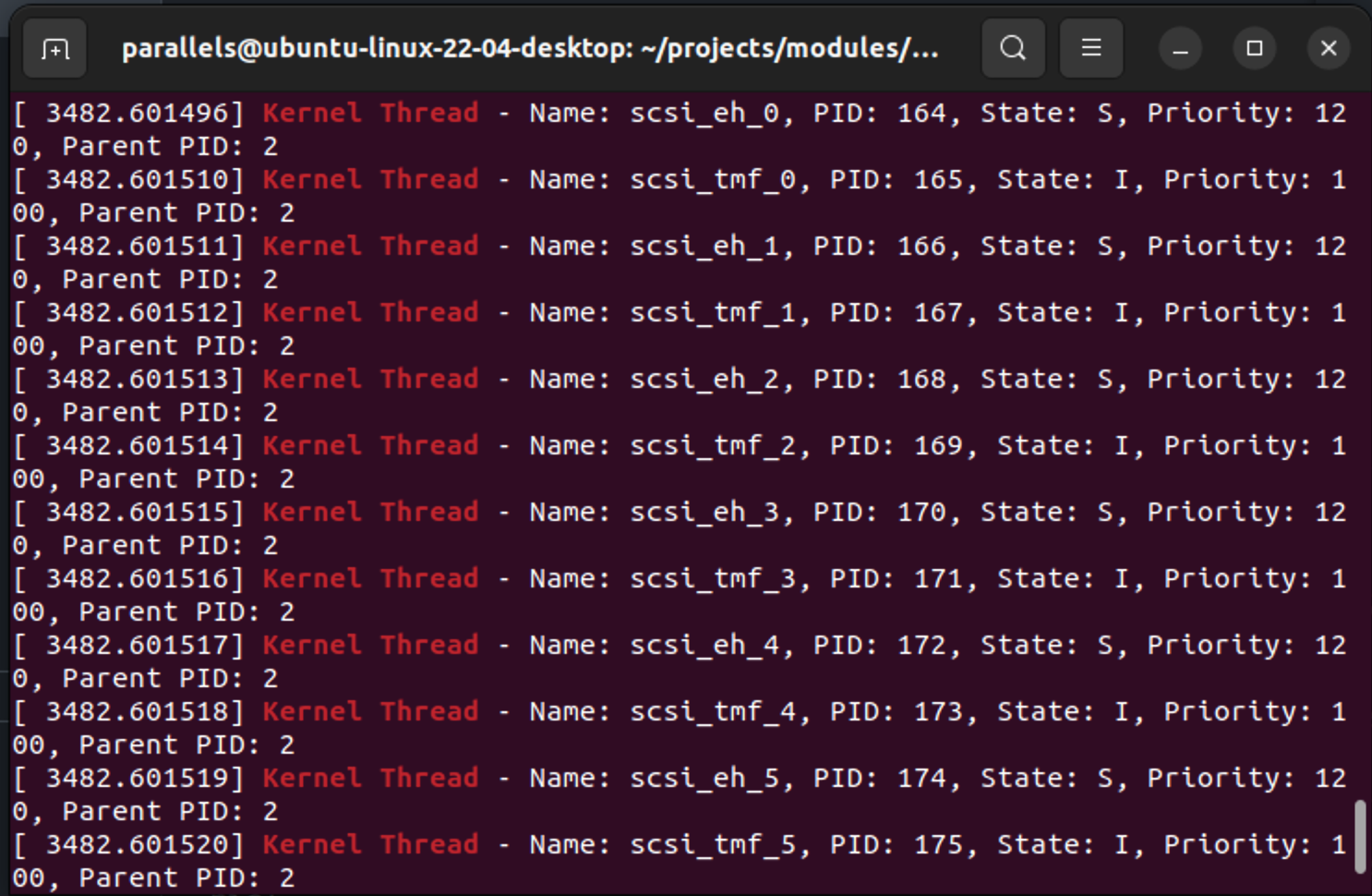
设计一个模块,要求列出系统中所有内核线程的程序名、PID、进程状态、进程优先级、父进程的PID。
#include <linux/kernel.h>
#include <linux/module.h>
#include <linux/sched.h>
#include <linux/sched/task.h>
MODULE_LICENSE("GPL");
MODULE_AUTHOR("ivor");
MODULE_DESCRIPTION("A module to list kernel threads");
static int __init list_kthreads_init(void) {
struct task_struct *task;
printk(KERN_INFO "Loading ListKThreads Module...\n");
for_each_process(task) {
// Check if the task is a kernel thread
if (task->mm == NULL) {
char state = task_state_to_char(task); // Get the task state as a character
printk(KERN_INFO "Kernel Thread - Name: %s, PID: %d, State: %c, Priority: %d, Parent PID: %d\n",
task->comm, task->pid, state, task->prio, task->parent->pid);
}
}
return 0;
}
static void __exit list_kthreads_exit(void) {
printk(KERN_INFO "Unloading ListKThreads Module...\n");
}
module_init(list_kthreads_init);
module_exit(list_kthreads_exit);
[c]
设计一个带参数的模块,其参数为某个进程的PID号,模块的功能是列出该进程的家族信息,包括父进程、兄弟进程和子进程的程序名、PID号、进程状态。
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/sched.h>
#include <linux/init.h>
#include <linux/pid.h>
#include <linux/sched/signal.h>
static int pid = 1; // 默认PID为1(init进程)
module_param(pid, int, 0644);
MODULE_PARM_DESC(pid, "The process ID to find the family of.");
static int __init pid_family_init(void)
{
struct pid *pid_struct;
struct task_struct *task;
struct task_struct *parent;
struct list_head *list;
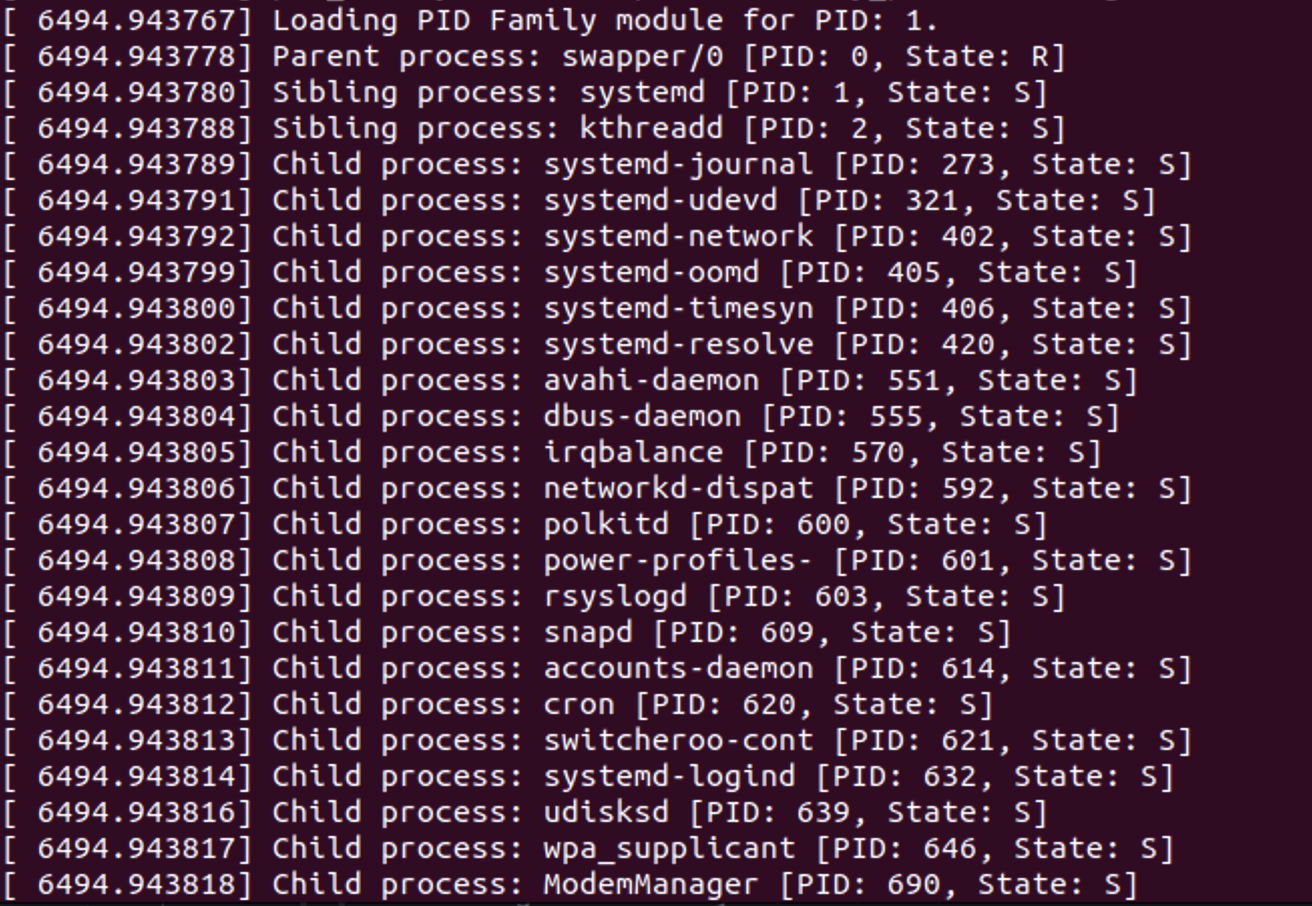
printk(KERN_INFO "Loading PID Family module for PID: %d.\n", pid);
// 获取PID对应的task_struct
pid_struct = find_get_pid(pid);
task = pid_task(pid_struct, PIDTYPE_PID);
if (!task)
{
printk(KERN_INFO "PID %d not found.\n", pid);
return -ESRCH;
}
parent = task->real_parent;
printk(KERN_INFO "Parent process: %s [PID: %d, State: %c]\n",
parent->comm, parent->pid, task_state_to_char(parent));
// 兄弟进程
list_for_each(list, &parent->children)
{
struct task_struct *sibling;
sibling = list_entry(list, struct task_struct, sibling);
printk(KERN_INFO "Sibling process: %s [PID: %d, State: %c]\n",
sibling->comm, sibling->pid, task_state_to_char(sibling));
}
// 子进程
list_for_each(list, &task->children)
{
struct task_struct *child;
child = list_entry(list, struct task_struct, sibling);
printk(KERN_INFO "Child process: %s [PID: %d, State: %c]\n",
child->comm, child->pid, task_state_to_char(child));
}
return 0;
}
static void __exit pid_family_exit(void)
{
printk(KERN_INFO "Unloading PID Family module.\n");
}
MODULE_LICENSE("GPL");
MODULE_AUTHOR("ivor");
MODULE_DESCRIPTION("A module to list process family by PID");
MODULE_VERSION("0.1");
module_init(pid_family_init);
module_exit(pid_family_exit);
[c]
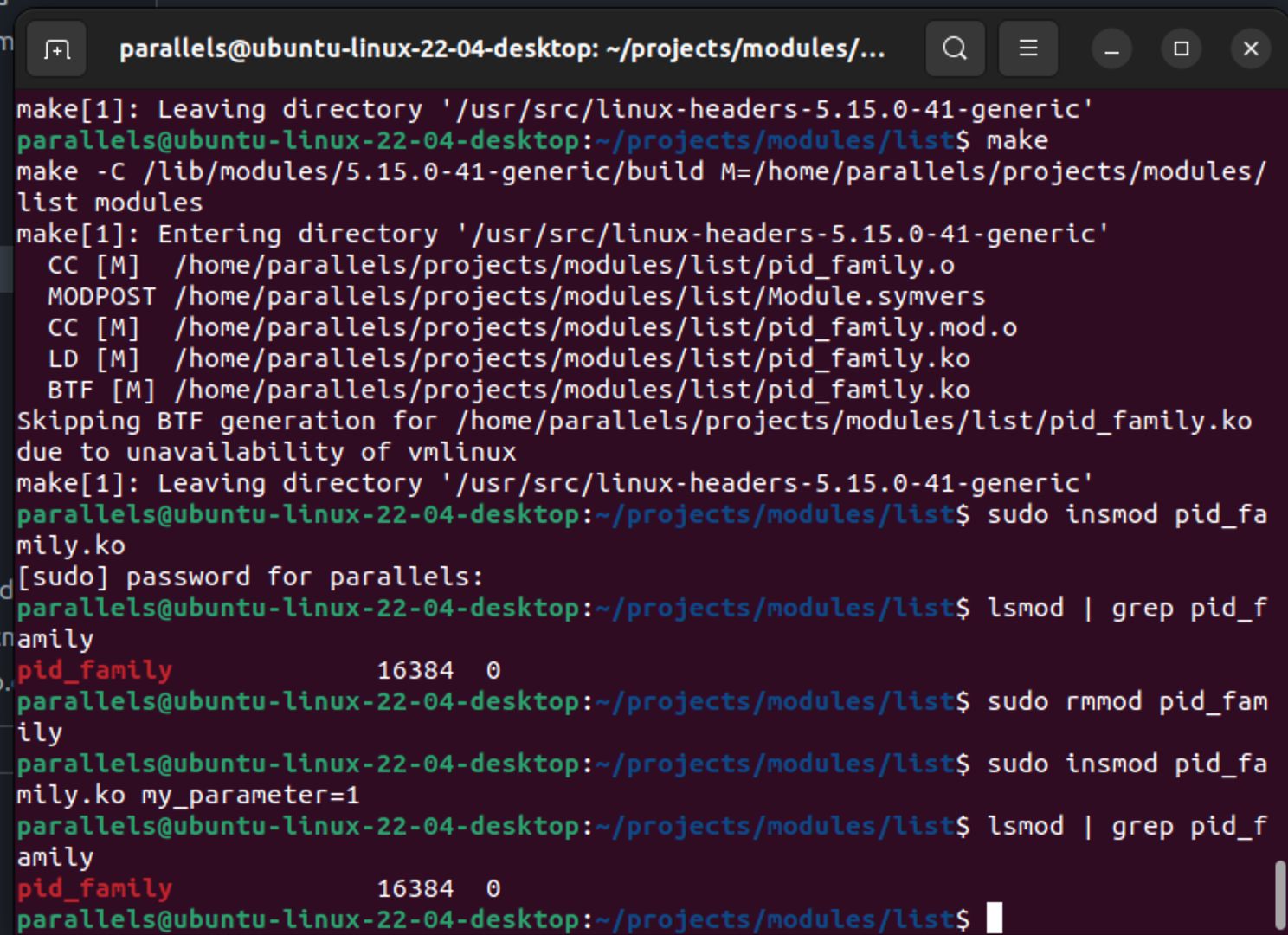
sudo insmod pid_family.ko my_parameter=1
[text]
追踪结果如下
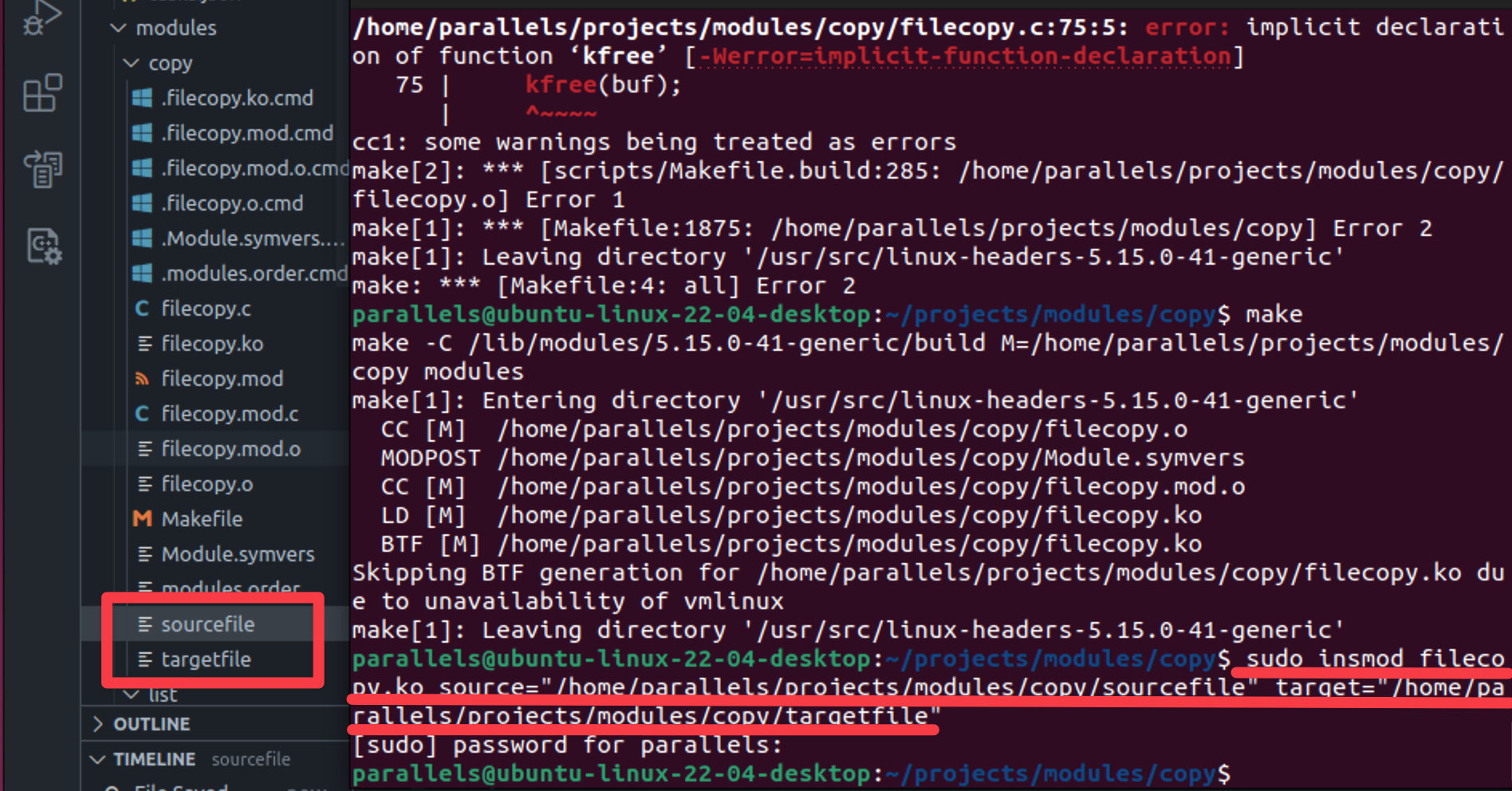
题目二: 设计一个带参数的模块,其参数为源文件和目标文件的文件名(可能带路径),模块功能是实现文件拷贝功能。
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/fs.h>
#include <linux/uaccess.h>
#include <linux/slab.h>
#include <linux/file.h>
#include <linux/mm.h>
MODULE_LICENSE("GPL");
MODULE_AUTHOR("ivor");
MODULE_DESCRIPTION("Simple file copying kernel module.");
static char *source = "";
static char *target = "";
module_param(source, charp, 0);
MODULE_PARM_DESC(source, "The source file path.");
module_param(target, charp, 0);
MODULE_PARM_DESC(target, "The target file path.");
static int __init filecopy_init(void) {
struct file *src_filp = NULL;
struct file *dst_filp = NULL;
loff_t src_size = 0;
char *buf = NULL;
ssize_t read_bytes, write_bytes;
printk(KERN_INFO "filecopy: Module loaded.\n");
if (strlen(source) == 0 || strlen(target) == 0) {
printk(KERN_ALERT "filecopy: Source and target paths must be set.\n");
return -EINVAL;
}
src_filp = filp_open(source, O_RDONLY, 0);
if (IS_ERR(src_filp)) {
printk(KERN_ALERT "filecopy: Cannot open source file: %ld.\n", PTR_ERR(src_filp));
return PTR_ERR(src_filp);
}
// Get the size of the source file
src_size = vfs_llseek(src_filp, 0, SEEK_END);
vfs_llseek(src_filp, 0, SEEK_SET);
dst_filp = filp_open(target, O_WRONLY | O_CREAT, 0644);
if (IS_ERR(dst_filp)) {
printk(KERN_ALERT "filecopy: Cannot open target file: %ld.\n", PTR_ERR(dst_filp));
filp_close(src_filp, NULL);
return PTR_ERR(dst_filp);
}
buf = kmalloc(src_size, GFP_KERNEL);
if (!buf) {
printk(KERN_ALERT "filecopy: Unable to allocate memory.\n");
filp_close(src_filp, NULL);
filp_close(dst_filp, NULL);
return -ENOMEM;
}
// Read data from source file
read_bytes = kernel_read(src_filp, buf, src_size, &src_filp->f_pos);
if (read_bytes < 0) {
printk(KERN_ALERT "filecopy: Failed to read from source file.\n");
kfree(buf);
filp_close(src_filp, NULL);
filp_close(dst_filp, NULL);
return read_bytes;
}
// Write data to target file
write_bytes = kernel_write(dst_filp, buf, read_bytes, &dst_filp->f_pos);
if (write_bytes != read_bytes) {
printk(KERN_ALERT "filecopy: Failed to write to target file.\n");
} else {
printk(KERN_INFO "filecopy: File copied successfully.\n");
}
kfree(buf);
filp_close(src_filp, NULL);
filp_close(dst_filp, NULL);
return 0;
}
static void __exit filecopy_exit(void) {
printk(KERN_INFO "filecopy: Module unloaded.\n");
}
module_init(filecopy_init);
module_exit(filecopy_exit);
[c]
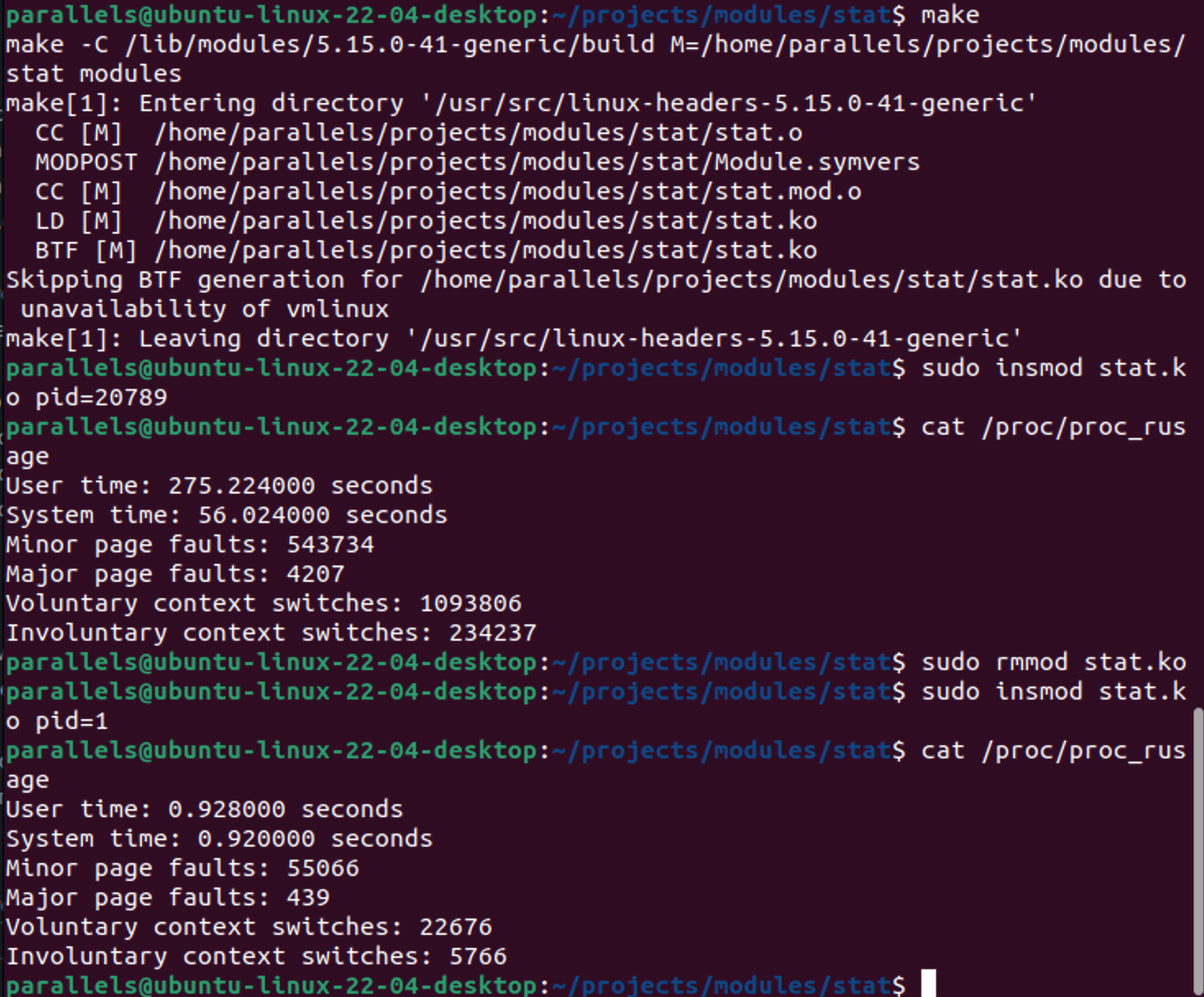
设计一个带参数的模块,其参数为指定进程标识符PID,模块功能是输出该进程所对应的资源使用情况,包括用户态和内核态的执行时间(以秒和微秒为单位)、无需和需要物理输入输出操作的页面错误次数、进程置换出内存的次数。(参考getrusage和sys_getrusage)
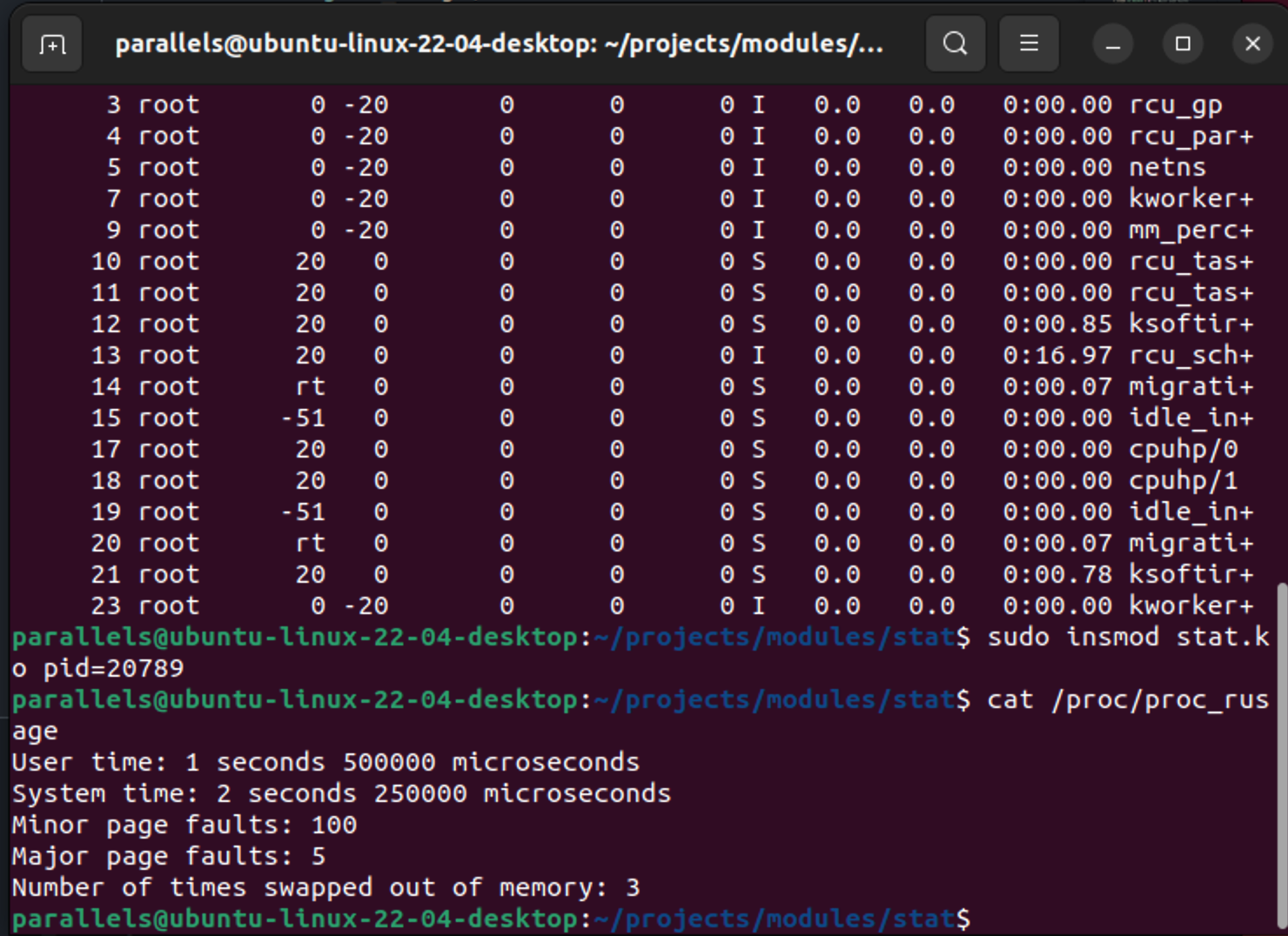
设计一个带参数的模块,其参数为指定进程标识符PID,模块功能是输出该进程所对应的资源使用情况,包括用户态和内核态的执行时间(以秒和微秒为单位)、无需和需要物理输入输出操作的页面错误次数、进程置换出内存的次数。(参考getrusage和sys_getrusage)
#include <linux/module.h>
#include <linux/sched.h>
#include <linux/sched/task.h>
#include <linux/sched/signal.h>
#include <linux/pid.h>
#include <linux/proc_fs.h>
#include <linux/seq_file.h>
#include <linux/uaccess.h>
MODULE_LICENSE("GPL");
MODULE_AUTHOR("ivor");
MODULE_DESCRIPTION("Module that reports resource usage of a process by PID.");
static int pid = -1;
module_param(pid, int, 0644);
MODULE_PARM_DESC(pid, "The process ID to report resource usage for.");
static int proc_show(struct seq_file *m, void *v) {
struct task_struct *task;
struct pid *pid_struct;
struct rusage r_usage;
pid_struct = find_get_pid(pid);
task = pid_task(pid_struct, PIDTYPE_PID);
if (task) {
get_task_struct(task);
memset(&r_usage, 0, sizeof(struct rusage));
// User time and system time
r_usage.ru_utime.tv_sec = task->utime / NSEC_PER_SEC;
r_usage.ru_utime.tv_usec = (task->utime % NSEC_PER_SEC) / NSEC_PER_USEC;
r_usage.ru_stime.tv_sec = task->stime / NSEC_PER_SEC;
r_usage.ru_stime.tv_usec = (task->stime % NSEC_PER_SEC) / NSEC_PER_USEC;
// Minor and major page faults
r_usage.ru_minflt = task->min_flt;
r_usage.ru_majflt = task->maj_flt;
// Context switches
r_usage.ru_nvcsw = task->nvcsw;
r_usage.ru_nivcsw = task->nivcsw;
// Output the collected information
seq_printf(m, "User time: %ld.%06ld seconds\n",
r_usage.ru_utime.tv_sec, r_usage.ru_utime.tv_usec);
seq_printf(m, "System time: %ld.%06ld seconds\n",
r_usage.ru_stime.tv_sec, r_usage.ru_stime.tv_usec);
seq_printf(m, "Minor page faults: %ld\n", r_usage.ru_minflt);
seq_printf(m, "Major page faults: %ld\n", r_usage.ru_majflt);
seq_printf(m, "Voluntary context switches: %ld\n", r_usage.ru_nvcsw);
seq_printf(m, "Involuntary context switches: %ld\n", r_usage.ru_nivcsw);
put_task_struct(task);
} else {
seq_printf(m, "Process with PID %d not found.\n", pid);
}
put_pid(pid_struct);
return 0;
}
static int proc_open(struct inode *inode, struct file *file) {
return single_open(file, proc_show, NULL);
}
static const struct proc_ops proc_fops = {
.proc_open = proc_open,
.proc_read = seq_read,
.proc_lseek = seq_lseek,
.proc_release = single_release,
};
static int __init rusage_mod_init(void) {
proc_create("proc_rusage", 0, NULL, &proc_fops);
printk(KERN_INFO "rusage_mod: Module loaded. Monitoring PID: %d\n", pid);
return 0;
}
static void __exit rusage_mod_exit(void) {
remove_proc_entry("proc_rusage", NULL);
printk(KERN_INFO "rusage_mod: Module unloaded.\n");
}
module_init(rusage_mod_init);
module_exit(rusage_mod_exit);
[c]
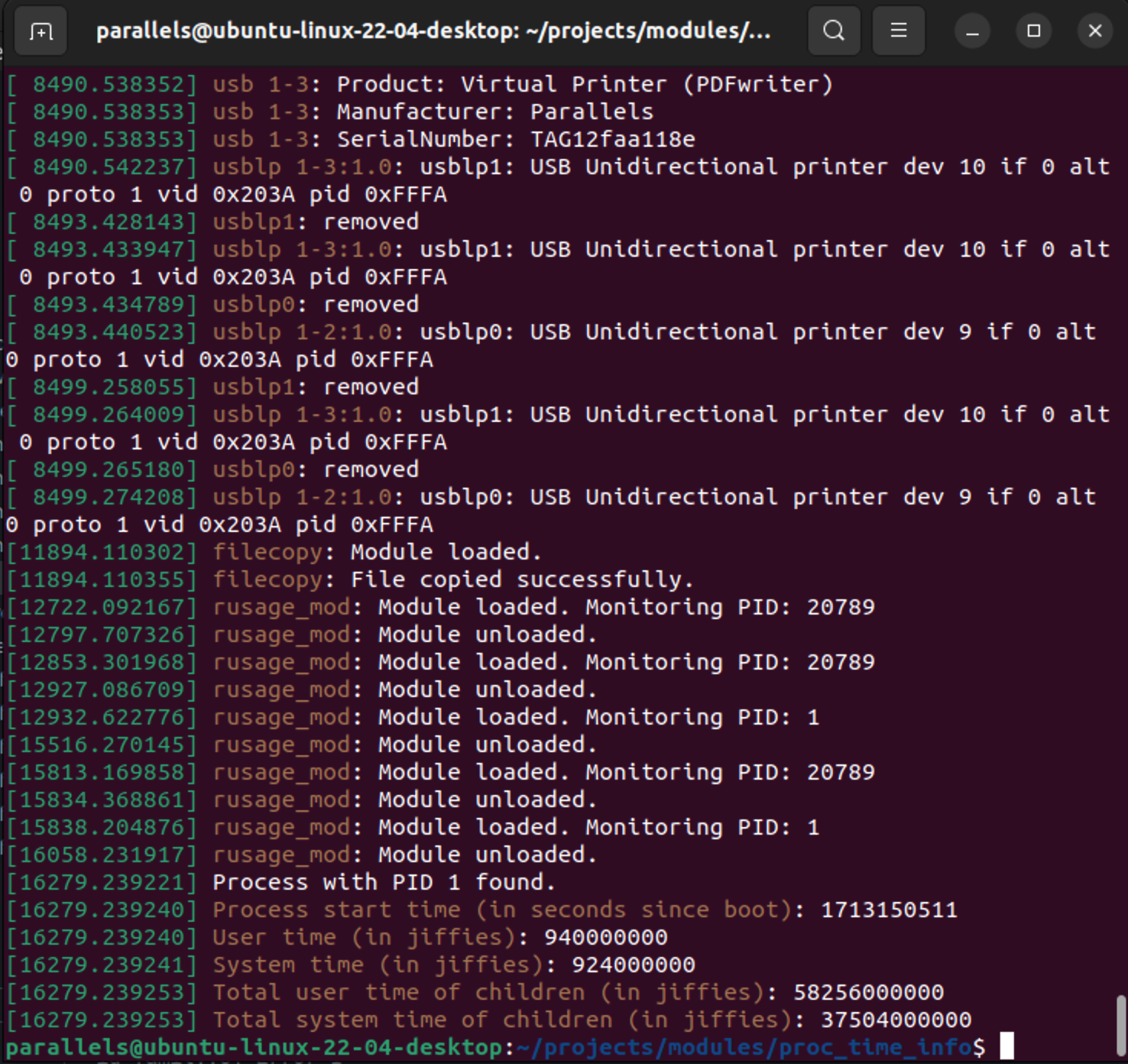
设计一个带参数的模块,其参数为指定进程标识符PID,模块功能是输出指定进程的相关时间信息,如进程创建时间、进程在用户态及内核态的运行时间、进程的所有子孙进程在用户态的运行时间及在内核态的运行时间等。
设计一个带参数的模块,其参数为新主机名,模块功能是改变原主机名称为参数传入的字符串(新主机名)。
#include <linux/kmod.h>
#include <linux/module.h>
MODULE_LICENSE("GPL");
MODULE_AUTHOR("ivor");
MODULE_DESCRIPTION("A module to change the hostname using usermodehelper");
static char *new_hostname = "new_hostname";
module_param(new_hostname, charp, 0644);
MODULE_PARM_DESC(new_hostname, "The new hostname to set");
static int __init set_hostname_init(void) {
char *argv[] = { "/usr/bin/hostname", new_hostname, NULL };
static char *envp[] = {
"HOME=/",
"TERM=linux",
"PATH=/sbin:/bin:/usr/sbin:/usr/bin", NULL
};
int ret = call_usermodehelper(argv[0], argv, envp, UMH_WAIT_EXEC);
if (ret != 0)
pr_err("Unable to set hostname, call_usermodehelper returned: %d\n", ret);
else
pr_info("Hostname set to %s\n", new_hostname);
return ret;
}
static void __exit set_hostname_exit(void) {
pr_info("Hostname change module unloaded\n");
}
module_init(set_hostname_init);
module_exit(set_hostname_exit);
[c]

设计一个带参数的模块,其参数为指定进程标识符PID和新nice值(优先值),模块功能为修改指定进程的优先级(nice值和prio值)
#include <linux/module.h>
#include <linux/sched.h>
#include <linux/sched/signal.h>
#include <linux/pid.h>
MODULE_LICENSE("GPL");
MODULE_AUTHOR("ivor");
MODULE_DESCRIPTION("A module to change the nice value of a process");
static int pid;
module_param(pid, int, 0644);
MODULE_PARM_DESC(pid, "The PID of the process");
static int new_nice;
module_param(new_nice, int, 0644);
MODULE_PARM_DESC(new_nice, "The new nice value for the process");
static int __init change_nice_init(void) {
struct pid *pid_struct;
struct task_struct *task;
int old_nice;
// Find the task_struct associated with this PID
pid_struct = find_get_pid(pid);
if (!pid_struct) {
pr_err("Could not find PID %d\n", pid);
return -ESRCH;
}
task = pid_task(pid_struct, PIDTYPE_PID);
if (!task) {
pr_err("Could not find task for PID %d\n", pid);
put_pid(pid_struct);
return -ESRCH;
}
// Get the old nice value before setting the new one
old_nice = task_nice(task);
// Attempt to set the new nice value
set_user_nice(task, new_nice);
// Check the nice value after setting it
if (task_nice(task) != new_nice) {
pr_err("Could not set nice value for PID %d, old nice was %d\n", pid, old_nice);
put_pid(pid_struct);
return -EACCES;
}
pr_info("Set nice value of PID %d from %d to %d\n", pid, old_nice, new_nice);
// Decrease the refcount of the pid
put_pid(pid_struct);
return 0;
}
static void __exit change_nice_exit(void) {
pr_info("Nice change module exited\n");
}
module_init(change_nice_init);
module_exit(change_nice_exit);
[c]