实验题目
利用 linux 的消息队列通信机制实现两个进程间的通信
编写程序创建两个进程:sender 和 receive ,其中 sender运行函数 sender(),它创建一个消息队列,然后,循环等待用户通过终端输入一串字符,将这串字符通过消息队列发送给 receiver ,直到用户输入“exit”为止;最后,它向 receiver 发送消息“end”,并且等待 receiver 的应答,等到应答消息后,将接收到的应答信息显示在终端屏幕上,删除相关消息队列,结束程序的运行。 Receiver 运行 receive(),它通过消息队列接收来自sender 的消息,将消息显示在终端屏幕上,直至收到内容为“end”的消息为止,此时,它向 sender 发送一个应答消息“over”,结束程序的运行。
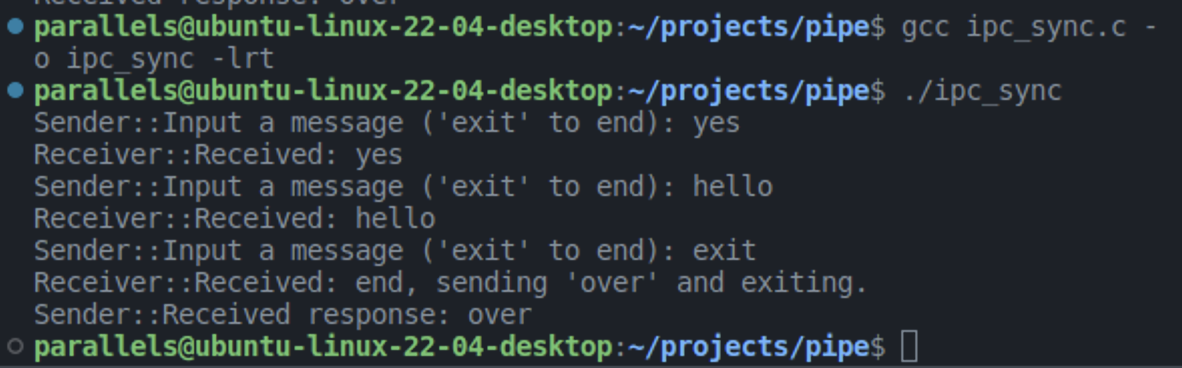
先上结果
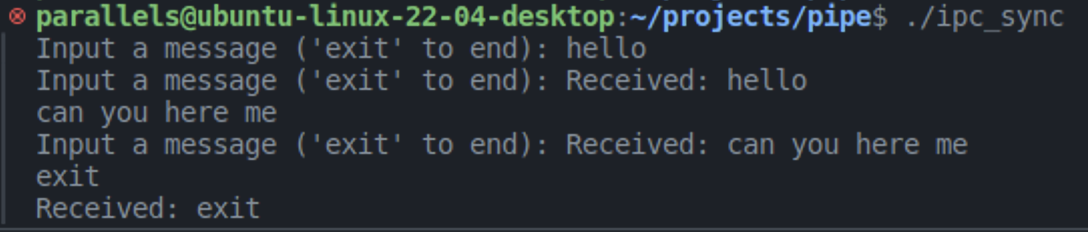
打印的消息同步问题
最开始的版本,Sender 发送消息到 Receiver 后,会率先在屏幕上打印出 Input Message: 像这样
解决办法
再建一个消息队列,负责消息的同步,Sender 在发送之后,需要接收到 Receiver 的 sync 消息才能继续。
#define QUEUE_NAME "/ipc_queue"
#define QUEUE_SYNC "/ipc_sync_queue"
// sender
// ...
// Wait for the receiver to be ready
if (mq_receive(mq_sync, buffer, MAX_SIZE, NULL) == -1) {
perror("mq_receive");
break;
}
// receiver
// print result
printf("Receiver::Received: %s\n", buffer);
// Indicate ready for the next message
if (mq_send(mq_sync, MSG_READY, strlen(MSG_READY) + 1, 0) == -1) {
perror("mq_send");
break;
}
[c]
全部代码
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
#include <fcntl.h>
#include <sys/stat.h>
#include <sys/wait.h>
#include <mqueue.h>
#define QUEUE_NAME "/ipc_queue"
#define QUEUE_SYNC "/ipc_sync_queue"
#define MAX_SIZE 1024
#define MSG_STOP "end"
#define MSG_READY "ready"
#define MSG_OVER "over"
void sender() {
mqd_t mq, mq_sync;
char buffer[MAX_SIZE];
struct mq_attr attr;
// Set the queue attributes
attr.mq_flags = 0;
attr.mq_maxmsg = 10;
attr.mq_msgsize = MAX_SIZE;
attr.mq_curmsgs = 0;
// Open or create the message queues
mq = mq_open(QUEUE_NAME, O_CREAT | O_WRONLY, 0644, &attr);
mq_sync = mq_open(QUEUE_SYNC, O_CREAT | O_RDONLY, 0644, &attr);
if (mq == (mqd_t)-1 || mq_sync == (mqd_t)-1) {
perror("mq_open");
exit(1);
}
while (1) {
// Wait for the receiver to be ready
if (mq_receive(mq_sync, buffer, MAX_SIZE, NULL) == -1) {
perror("mq_receive");
break;
}
printf("Sender::Input a message ('exit' to end): ");
fflush(stdout);
memset(buffer, 0, sizeof(buffer));
fgets(buffer, MAX_SIZE, stdin);
// Remove newline character, if present
size_t len = strlen(buffer);
if (len > 0 && buffer[len - 1] == '\n') {
buffer[--len] = '\0';
}
// Check if the user wants to exit
if (strncmp(buffer, "exit", strlen("exit")) == 0) {
strcpy(buffer, MSG_STOP); // Set buffer to "end"
len = strlen(MSG_STOP);
}
// Send the message
if (mq_send(mq, buffer, len + 1, 0) == -1) {
perror("mq_send");
break;
}
// If we sent "end", wait for "over" and then exit
if (strncmp(buffer, MSG_STOP, strlen(MSG_STOP)) == 0) {
if (mq_receive(mq_sync, buffer, MAX_SIZE, NULL) == -1) {
perror("mq_receive");
break;
}
if (strncmp(buffer, MSG_OVER, strlen(MSG_OVER)) == 0) {
printf("Sender::Received response: %s\n", buffer);
break;
}
}
}
// Cleanup
mq_close(mq);
mq_unlink(QUEUE_NAME);
mq_close(mq_sync);
mq_unlink(QUEUE_SYNC);
}
void receiver() {
mqd_t mq, mq_sync;
char buffer[MAX_SIZE];
struct mq_attr attr;
// Set the queue attributes
attr.mq_flags = 0;
attr.mq_maxmsg = 10;
attr.mq_msgsize = MAX_SIZE;
attr.mq_curmsgs = 0;
// Open the message queues
mq = mq_open(QUEUE_NAME, O_CREAT | O_RDONLY, 0644, &attr);
mq_sync = mq_open(QUEUE_SYNC, O_CREAT | O_WRONLY, 0644, &attr);
if (mq == (mqd_t)-1 || mq_sync == (mqd_t)-1) {
perror("mq_open");
exit(1);
}
// Send ready message to sender
if (mq_send(mq_sync, MSG_READY, strlen(MSG_READY) + 1, 0) == -1) {
perror("mq_send");
mq_close(mq);
mq_unlink(QUEUE_NAME);
mq_close(mq_sync);
mq_unlink(QUEUE_SYNC);
exit(1);
}
while (1) {
// Receive the message
ssize_t bytes_read = mq_receive(mq, buffer, MAX_SIZE, NULL);
if (bytes_read == -1) {
perror("mq_receive");
break;
}
buffer[bytes_read] = '\0';
// Check for the "end" message
if (strncmp(buffer, MSG_STOP, strlen(MSG_STOP)) == 0) {
// Send the "over" message to the sender
if (mq_send(mq_sync, MSG_OVER, strlen(MSG_OVER) + 1, 0) == -1) {
perror("mq_send");
break;
}
printf("Receiver::Received: %s, sending 'over' and exiting.\n", buffer);
break;
} else {
printf("Receiver::Received: %s\n", buffer);
// Indicate ready for the next message
if (mq_send(mq_sync, MSG_READY, strlen(MSG_READY) + 1, 0) == -1) {
perror("mq_send");
break;
}
}
}
// Cleanup
mq_close(mq);
mq_close(mq_sync);
}
int main() {
pid_t pid = fork();
if (pid == 0) {
// Child process - receiver
receiver();
} else if (pid > 0) {
// Parent process - sender
sender();
wait(NULL); // Wait for child process to finish
} else {
perror("fork");
return 1;
}
return 0;
}
[c]